Vacuüm grijper voor spiegels
Een compacte grijper met een horizontale en verticale veerweg van 40 mm, bewaakt met sensoren, voor spiegels tot 8 kg gewicht.
Met een Kuka robot worden de spiegels opgepakt, om vervolgens in een centreer mal af te leggen. Met de bewaakte horizontale en verticale veerweg van 40 mm, worden de spiegels in een hoek gedrukt. Zodra de sensoren op de grijper geactiveerd worden, is men zeker dat de juiste positie bereikt is.
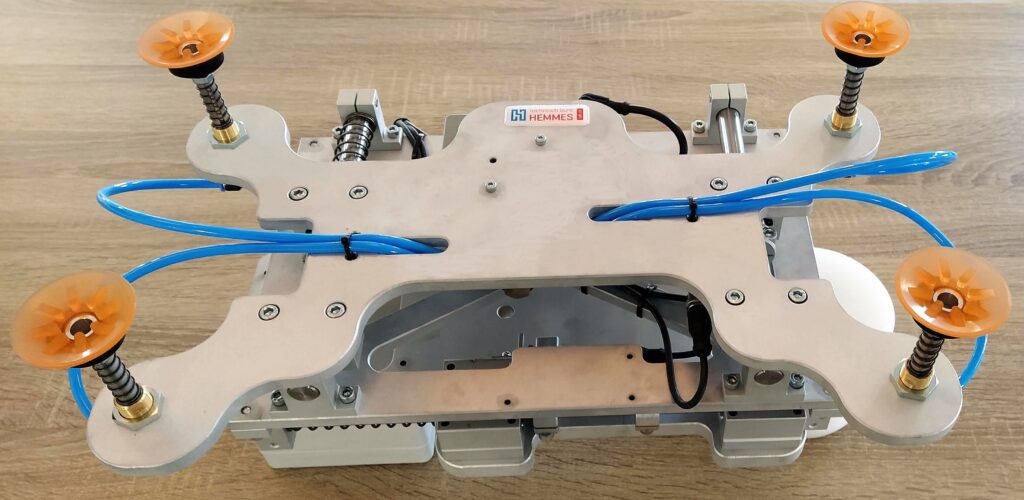
De grijper is opgebouwd uit een flensplaat voor aan de Kuka KR210 robot. Op de flensplaat worden 2 geleiding gemaakt, om een horizontale en verticale beweging te maken met een afstand van 40mm. De beweging zal doormiddel van veerdruk in een rustpositie worden gehouden. De rust en eindposities worden bewaakt door inductieve sensoren.
Op deze basis zijn 4 zuignappen gemonteerd met verende zuignap vingers. Een Fipa MFE-200H ejector verzorgd het vacuüm. De ingebouwde vacuümsensor, afblaas functie en lucht bespaar functie, dragen bij aan een economisch gebruik van perslucht. Alle elektrische signalen zijn uitbedraad in een klemmenkastje op de grijper.